Κανόνες Εργαστηρίου

Θυμηθείτε πως:
SID 2022
Safe Internet Day
 |

![]()
Εκπαιδευτική Ρομποτική
Κατασκευή ρομπότ Rover ακολουθώντας οδηγίες.
Δραστηριότητα
Μέρος Α. (Κατασκευή ρομπότ)
Κάντε κλικ δίπλα και κατεβάστε τις οδηγίες κατασκευής: Μέρος α. Μέρος β. |
 |


Μέρος Β. (Περιβάλλον προγραμματισμού)
- Η πρώτη μας αποστολή είναι να δημιουργήσουμε ένα απλό πρόγραμμα που θα κινεί το ρομπότ ακριβώς 26 εκατοστά σε ευθεία κατεύθυνση.
- Η δεύτερη αποστολή μας είναι να τοποθετήσουμε ένα ορθογώνιο κουτί στο δάπεδο και αφού μετρήσουμε τις διαστάσεις του (μήκος, πλάτος) να δημιουργήσουμε ένα πρόγραμμα με το οποίο το ρομπότ θα κινείται περιμετρικά (γύρω) από το κουτί κάνοντας σε κάθε γωνία του στροφή 90 μοιρών.
- Η τρίτη μας αποστολή θα είναι να κινήσουμε το ρομπότ περιμετρικά (γύρω) από το κουτί (στρίβοντας κάθε φορά κατά 90 μοίρες) χρησιμοποιώντας εντολή επανάληψης.
- Στην τέταρτή μας αποστολή θα χρησιμοποιήσουμε τον αισθητήρα των υπερύθρων ο οποίος θα στέλνει πληροφορίες στο πρόγραμμα που θα δημιουργήσουμε για την απόσταση του τοίχου στα δεξιά του ρομπότ.
Συμπεράσματα:
|
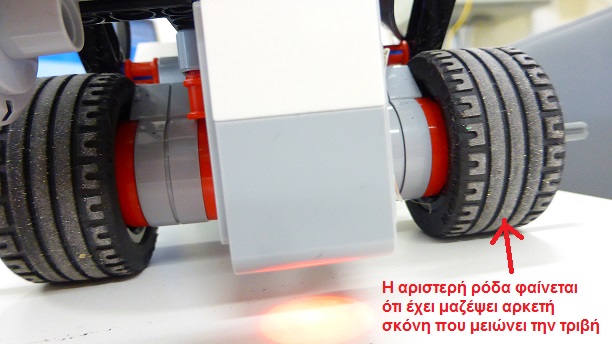
Πείραμα 1. Δηλαδή : κίνηση ευθεία 30 εκ. στροφή δεξιά 90 μοίρες, κίνηση ευθεία 16 εκ. στροφή δεξιά 90 μοίρες, κίνηση ευθεία 30 εκ. στροφή δεξιά 90 μοίρες, κίνηση ευθεία 16 εκ. στροφή δεξιά 90 μοίρες. Το δεύτερο πείραμα απέτυχε !!! Ο λόγος δεν ήταν οι υπολογισμοί μας, ούτε το πρόγραμμα τα οποία ήταν σωστά.
Είπαμε λοιπόν ότι θα συνδέσουμε τον αισθητήρα υπερύθρων (ο οποίος μετρά την απόσταση από εμπόδια) σε θέση λοξή, πάνω στο ρομπότ, ώστε να κοιτά προς τα δεξιά που θα ήταν το χάρτινο κουτί. Στη συνέχεια δημιουργήσαμε ένα πρόγραμμα το οποίο παίρνει την ένδειξη απόστασης από το εμπόδιο που δείχνει ο αισθητήρας υπερύθρων και εάν αυτή είναι μεγαλύτερη από μια τιμή που καθορίσαμε τότε το ρομπότ δίνει εντολή να στρίψει δεξιά (ώστε να πλησιάσει το εμπόδιο), εάν η ένδειξη του αισθητήρα υπερύθρων γίνει μικρότερη από την τιμή που έχουμε ορίσει τότε το ρομπότ δίνει εντολή ώστε οι κινητήρες να το στρίψουν αριστερά (ώστε να μην πέσει επάνω στο εμπόδιο). |